A big element of my rig that needed to be implemented was the finger controls that I required for my trailer.
To do this I looked at the rig that our lecturer let us use for practice. At first I planned to create the fingers using FKs (forward kinematics), I shortly realized this isn't necessary. After discover that my lecturers rig used no IKs or FKs for the hand I began to research into what exactly he used. my research eventually lead me to discover that using set driven keys is a common method of controlling the fingers. After further dissecting of the rig I find out that this is what my lecturer used as well and set up replicating it.
To do this I looked at the rig that our lecturer let us use for practice. At first I planned to create the fingers using FKs (forward kinematics), I shortly realized this isn't necessary. After discover that my lecturers rig used no IKs or FKs for the hand I began to research into what exactly he used. my research eventually lead me to discover that using set driven keys is a common method of controlling the fingers. After further dissecting of the rig I find out that this is what my lecturer used as well and set up replicating it.
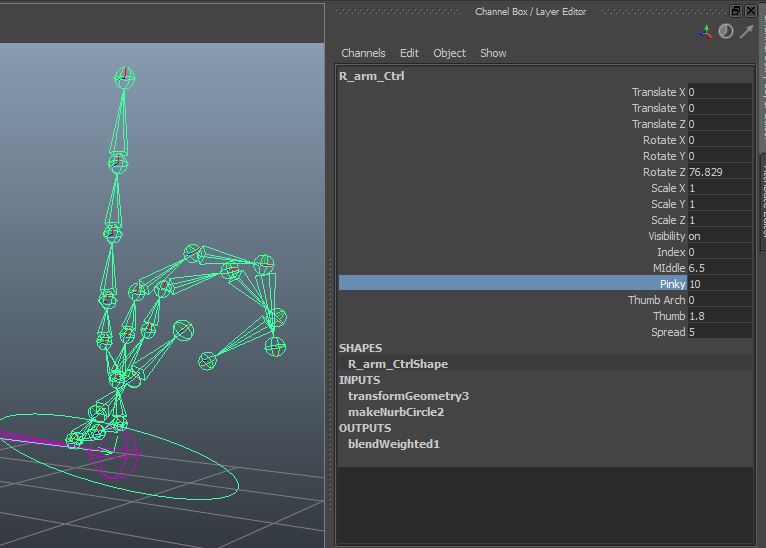
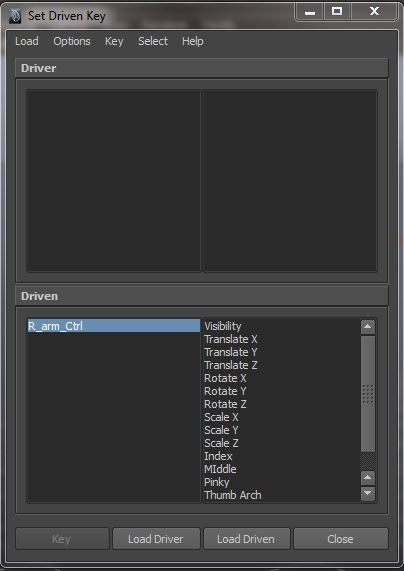 | Using this window I slowly created the keys for each finger's motion. By linking the attributes that I create on my controls to the joints, I am able to replicate the motion of the finger. Although this task was really time consumer, I feel that the end result was exactly what I was after, giving me almost perfect control over the hand. |
This was the end product. As I've not personally tried the other methods of controlling the hand such as the use of FKs, I can't comment on whether I this is the better method or not. Although from doing research the use of FKs seems to cause a lot of clutter around the hands due to the controls that are necessary to control it. Due to the smaller nature of my mech I feel that this is the more suitable method for my rig.
 RSS Feed
RSS Feed
