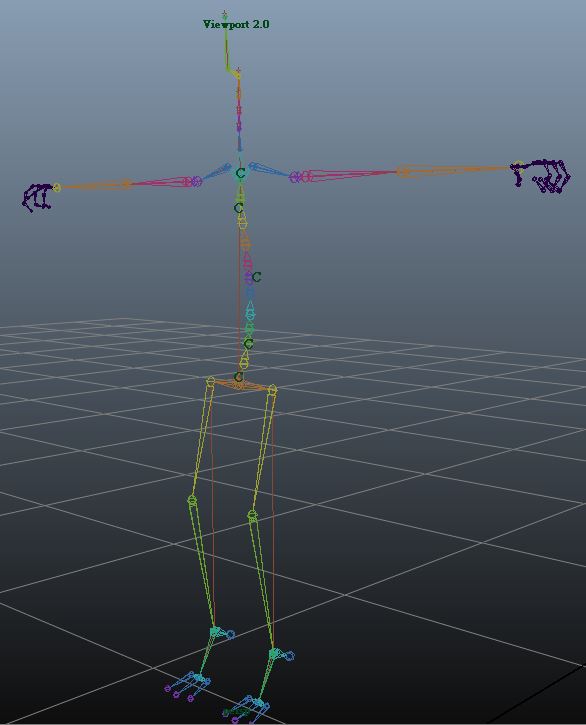
After I had completed the joints I moved onto creating the IKs for my mech. This was fairly straight forward as I have done this a few times now.
For the leg and arms I used to the rotate plane solver IK from the hip to the ankle and shoulder to the wrist respectively. This would give my mech the functionality it needs for the arms and legs.
The only part I had slight issues with was the creation of the spline IK for the spine. As this was not a tool I had often used. The mistake I made was that I forgot to create clusters for the vertices that are created to control the motion. I ended up figuring this out while reading through my notes for creating spline Iks.
After creating the the spline clusters it gave me exactly the functionality I needed for my mech.
For the leg and arms I used to the rotate plane solver IK from the hip to the ankle and shoulder to the wrist respectively. This would give my mech the functionality it needs for the arms and legs.
The only part I had slight issues with was the creation of the spline IK for the spine. As this was not a tool I had often used. The mistake I made was that I forgot to create clusters for the vertices that are created to control the motion. I ended up figuring this out while reading through my notes for creating spline Iks.
After creating the the spline clusters it gave me exactly the functionality I needed for my mech.
 RSS Feed
RSS Feed
